Screenshot Software:
Szczegóły programowe:
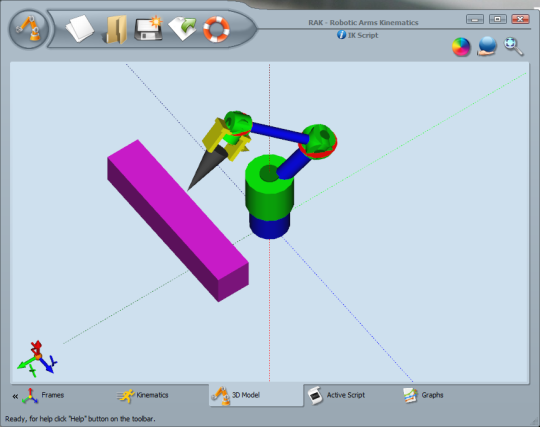
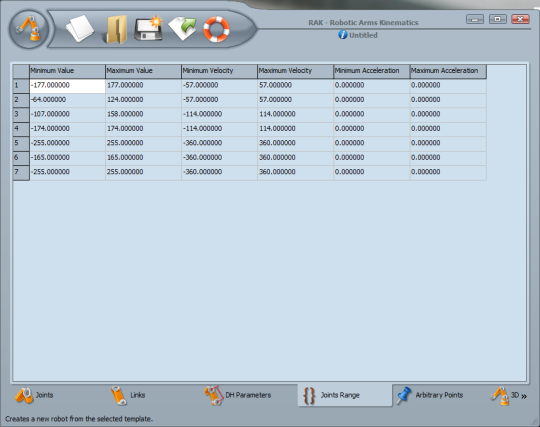
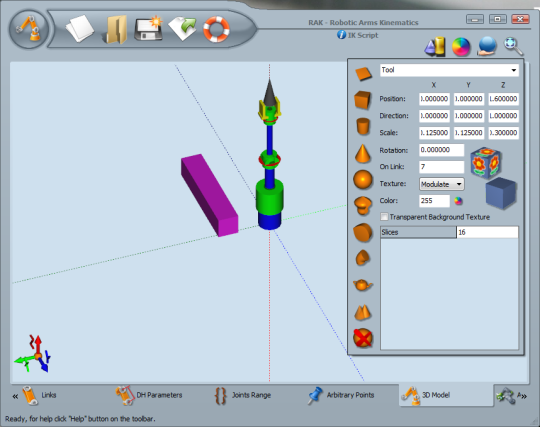
RAK to program do modelowania i obliczania ramiona robotów ich kinematyki.
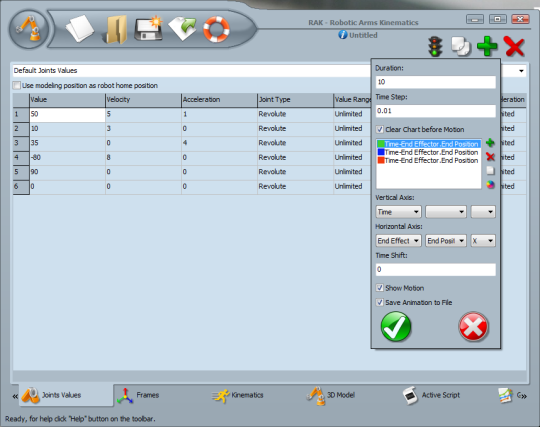
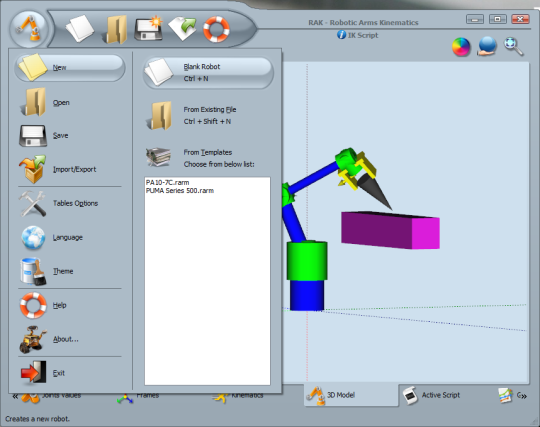
Ten program może symulować otwartej pętli, roboty jednołańcuchowych.
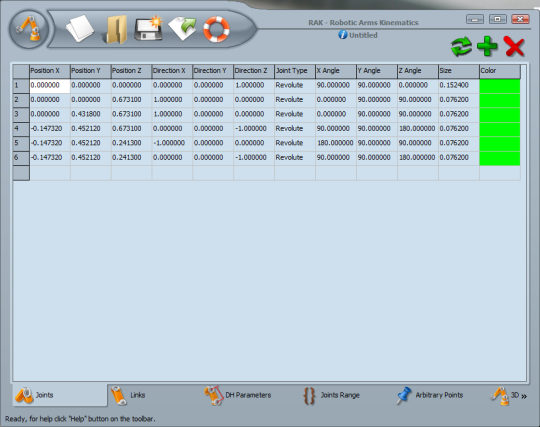
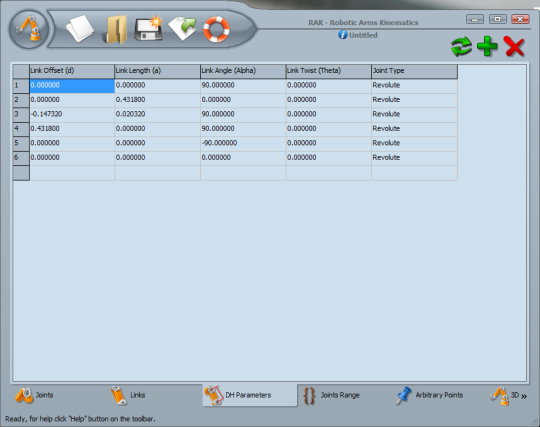
Można modelować robota przez jego stawów pozycji lub Denavita-Hartenberg (DH) parametrów.
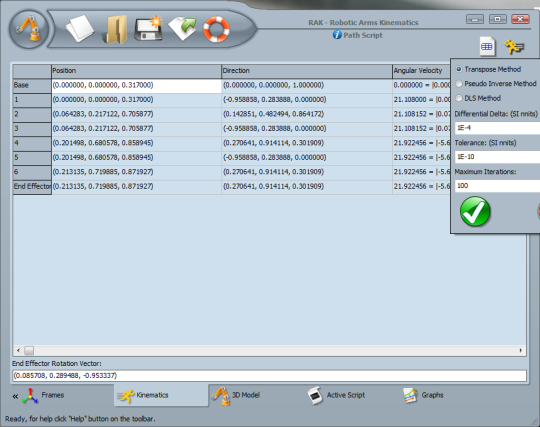
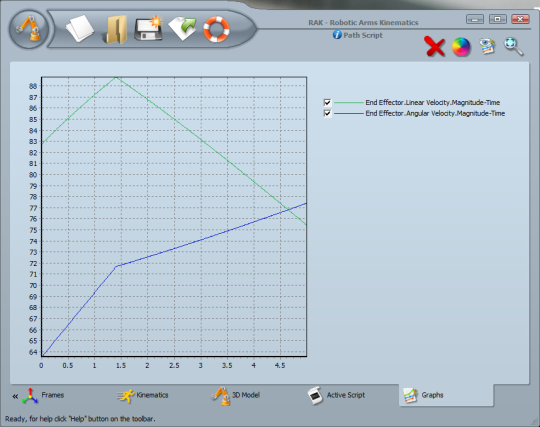
Można obliczyć kinematyki i kinematyki odwrotnej robota przez ten program.
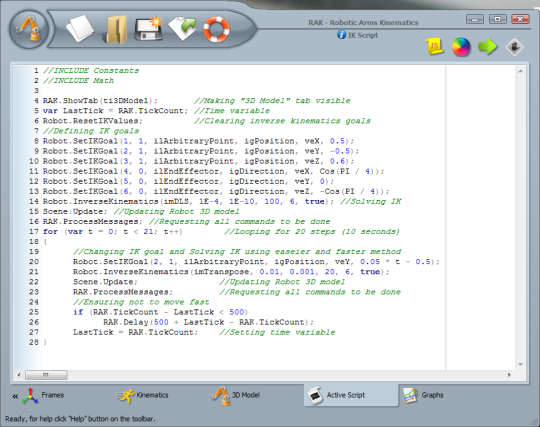
Istnieje również obszar programowania pisać programy i kontrolować rzeczywiste roboty.

Komentarze nie znaleziono